China Moneypro
Thermal Resolution vs Sensitivity
Master thermal imaging specs. Compare spatial resolution vs NETD sensitivity to optimize IR system performance. Expert guide for B2B integrators.
In the domain of infrared system integration, two specifications dominate the datasheet: thermal spatial resolution and thermal sensitivity (NETD). For B2B system integrators designing electro-optical solutions for defense, security, or industrial automation, distinguishing between these two parameters is critical. A common misconception equates higher pixel counts directly to better image quality, yet without adequate thermal sensitivity, high-resolution arrays fail to detect critical threats in low-contrast environments. This deep dive clarifies the engineering trade-offs between resolution and sensitivity and provides guidance on selecting the right infrared detector core for specific mission requirements.
Key Takeaways for Infrared System Design
- Resolution Defines Detail: Spatial resolution (FPA size) determines the amount of geometric detail and the detection range based on Johnson’s criteria.
- Sensitivity Defines Contrast: NETD (Noise Equivalent Temperature Difference) determines the smallest detectable temperature difference, crucial for low-contrast scenes.
- The Pixel Pitch Trade-off: Smaller pixel pitches (e.g., 12μm) allow for smaller optics but physically collect less energy, challenging the NETD performance compared to larger pixels (17μm).
- Application Specifics: Long-range surveillance prioritizes resolution, while non-destructive testing (NDT) and medical imaging prioritize sensitivity.
Defining Thermal Spatial Resolution
Thermal spatial resolution refers to the granularity of the image produced by the infrared detector. It is primarily governed by the number of pixels on the Focal Plane Array (FPA) and the Field of View (FOV) provided by the optics. Common FPA formats in uncooled VOx microbolometers range from 320×240 (QVGA) to 640×512 (VGA) and up to 1280×1024 (SXGA) for high-definition thermal imaging.
For system integrators, resolution is the defining factor for Instantaneous Field of View (IFOV). IFOV represents the angle in milliradians subtended by a single pixel. A lower IFOV means finer spatial resolution, allowing the system to resolve smaller targets at greater distances.
Impact of Resolution on Detection Ranges
The relationship between resolution and range is governed by Johnson’s Criteria, which dictates the number of pixels required across a target’s critical dimension to achieve Detection, Recognition, or Identification (DRI).
A VGA sensor (640×512) provides four times the pixel count of a QVGA sensor (320×240). This allows an integrator to either maintain the same FOV with higher image fidelity or narrow the FOV to double the detection range while maintaining situational awareness. However, raw pixel count implies nothing about the detector’s ability to see heat signatures against a background of a similar temperature. That capability is the domain of sensitivity.
Understanding Thermal Sensitivity and NETD
Thermal sensitivity is quantified by the Noise Equivalent Temperature Difference (NETD). This metric represents the smallest temperature difference the detector can distinguish from the intrinsic noise of the system. It is typically measured in milliKelvin (mK).
A lower NETD value indicates superior performance. Modern uncooled VOx microbolometers typically offer NETD values ranging from <50mK for standard entry-level cores to <20mK for high-performance cooled detectors or premium uncooled sensors.
Why NETD Matters in Low Contrast Scenes
In high-contrast scenarios, such as a person (37°C) walking against a snowy background (-5°C), sensitivity is less critical; the delta T is massive. However, system integrators often face low-contrast environments. Examples include:
- Maritime Surveillance: Detecting a head floating in water where the temperature differential is minimal.
- Fog and Rain: Atmospheric moisture scatters infrared radiation and reduces the thermal contrast of the scene (known as “thermal washout”).
- Industrial NDT: Detecting slight resistive heating in a circuit board trace before failure occurs.
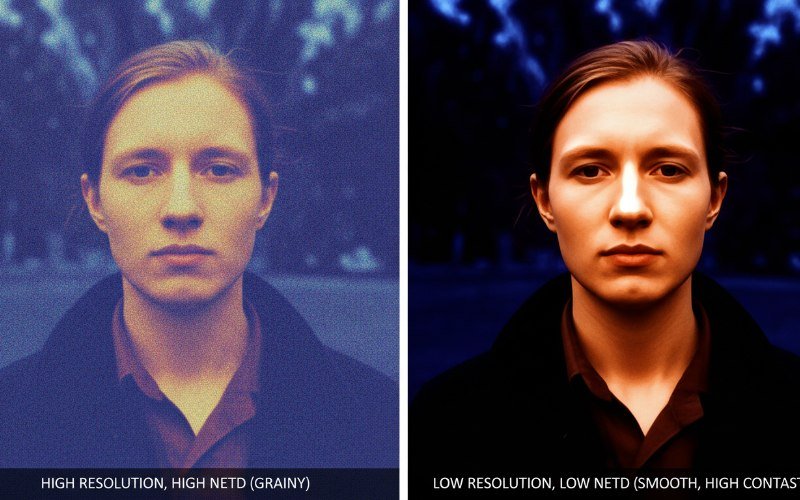
In these cases, a sensor with an NETD of 60mK might display a noisy, uniform gray image, while a sensor with an NETD of <30mK will clearly resolve the structural details of the target.
The Physics of Pixel Pitch and Energy Collection
A critical engineering challenge arises when manufacturers reduce pixel pitch. The industry has trended from 25μm to 17μm, and now 12μm and 10μm standard pitches. Smaller pixels allow for smaller, lighter, and cheaper germanium optics—a major SWaP (Size, Weight, and Power) advantage for drone and handheld integration.
The Signal to Noise Ratio Challenge
As the pixel size decreases, the physical area available to collect infrared photons decreases by the square of the reduction. A 12μm pixel has roughly half the surface area of a 17μm pixel. Consequently, it collects significantly less thermal energy.
To maintain high sensitivity (low NETD) with smaller pixels, manufacturers must improve the Temperature Coefficient of Resistance (TCR) of the sensing material (typically Vanadium Oxide or Amorphous Silicon) and optimize the Readout Integrated Circuit (ROIC) to minimize electronic noise. This is why a 12μm 640×512 core with an NETD of <40mK represents a significant engineering achievement compared to a 17μm core with similar specs.
Comparing Resolution and Sensitivity Priorities
When specifying a thermal module, integrators must balance these two factors based on the end-user application. The table below outlines which metric takes precedence across different verticals.
| Application Vertical | Primary Priority | Secondary Priority | Engineering Rationale |
|---|---|---|---|
| Long-Range Border Security | Resolution | Sensitivity | Detecting a human-sized target at 2km+ requires high spatial resolution (narrow IFOV) to satisfy Johnson’s criteria. |
| Search and Rescue (Maritime) | Sensitivity (NETD) | Resolution | Targets in water have extremely low thermal contrast. <30mK is required to differentiate a target from waves. |
| UAV / Drone Inspection | Resolution | Sensitivity | Drones fly at altitude; high resolution is needed to resolve ground details. SWaP constraints also favor smaller pixel pitch. |
| Gas Leak Detection (OGI) | Sensitivity | Resolution | Detecting gas plumes requires perceiving very subtle temperature or spectral absorption differences. Cooled detectors are often used here. |
| Building Diagnostics | Sensitivity | Resolution | Identifying moisture intrusion or insulation gaps relies on spotting minute surface temperature variations. |
The Role of F-Number in Sensitivity
System integrators must also consider the optical F-number. The NETD specified on a detector datasheet is typically measured at f/1.0. However, to save weight or cost, integrators might pair the sensor with an f/1.2 or f/1.4 lens.
Increasing the F-number reduces the amount of thermal energy reaching the sensor. An f/1.4 lens admits approximately half the light of an f/1.0 lens. This effectively degrades the system sensitivity. A core rated at 40mK NETD (at f/1.0) generally performs closer to 80mK when paired with an f/1.4 lens, potentially rendering it unsuitable for low-contrast applications. Always calculate the system-level NETD rather than relying solely on the detector specification.
Frequently Asked Questions
Is higher resolution always better than better sensitivity?
How does pixel pitch affect the choice of lens?
What is considered a good NETD value for industrial integration?
Can image processing improve poor sensitivity?