China Moneypro
PTZ Camera vs Gimbal Payload
Compare engineering differences between PTZ cameras and gimbal payloads. Understand stabilization, mechanics, and optimal use cases for EO/IR systems.
This article is part of our Systems & Payloads section. For a complete overview, visit our Knowledge Hub guide.
Selecting the correct electro-optical system defines the success of surveillance and inspection missions. Engineers and procurement officers often evaluate two primary mechanical architectures when integrating thermal and visible light sensors. These are the Pan-Tilt-Zoom (PTZ) camera and the Gyro-Stabilized Gimbal Payload. While both systems allow a sensor to rotate and zoom, their internal mechanics, stabilization capabilities, and intended environments differ fundamentally.
A standard PTZ camera generally suits fixed infrastructure where structural stability is guaranteed. A gimbal payload utilizes sophisticated inertial measurement units (IMUs) and brushless motors to actively counteract vehicle motion. This distinction determines whether a system can deliver clear imagery from a vibrating drone or a swaying mast.
This engineering analysis breaks down the electromechanical differences, stabilization performance, and integration requirements of PTZ cameras versus gimbal payloads.
Key Takeaways
- Mechanical Architecture: PTZ cameras typically use geared motors for high torque and position holding, while gimbals use direct-drive brushless motors for rapid response.
- Stabilization Accuracy: Gimbals achieve superior stabilization often below 50 µrad using active gyro-stabilization, which is essential for moving platforms.
- Movement Axes: PTZ systems operate on two axes (pan and tilt), whereas gimbals often include a third roll axis to maintain a level horizon.
- Application Environment: PTZ is the standard for fixed security towers and perimeters. Gimbals are mandatory for UAVs, marine vessels, and mobile vehicles.
Fundamental Mechanics of PTZ Cameras
The term PTZ refers to the ability to Pan (horizontal rotation), Tilt (vertical rotation), and Zoom (optical focal length adjustment). In traditional heavy-duty PTZ camera systems, the mechanical design prioritizes durability and position holding over rapid stabilization.
Geared Drive Systems
Most industrial PTZ cameras utilize stepper motors connected to a gear train or belt drive. This gearing provides high holding torque, allowing the camera to remain fixed on a target even in high wind conditions. However, the gear backlash introduces a mechanical limitation known as hysteresis. This makes it difficult to make micro-adjustments rapidly, limiting the system’s ability to compensate for high-frequency vibrations.
Two Axis Limitation
Standard PTZ systems operate on two axes. They rotate left-right and up-down. They lack a roll axis. If the mounting platform tilts sideways, the video horizon tilts with it. For a camera mounted on a concrete pole, this is irrelevant. For a camera on a boat or aircraft, this lack of a roll axis renders the footage disorienting and difficult for analytics software to process.
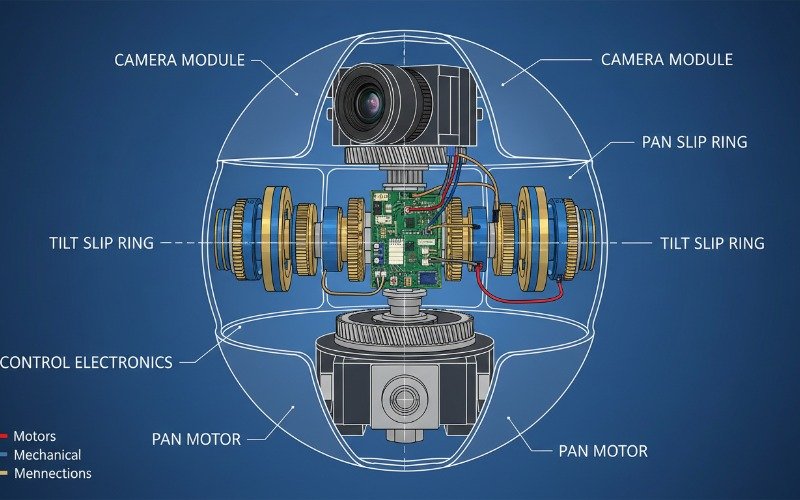
Engineering Behind Gimbal Payloads

A gimbal payload is an electromechanical system designed to isolate the sensor from the movement of the carrier platform. Whether mounted on a drone (UAV) or a ground vehicle (UGV), the gimbal’s primary goal is decoupling.
Direct Drive Brushless Motors
Unlike the geared motors of a PTZ, gimbals utilize distinct brushless DC (BLDC) motors for direct drive actuation. These motors offer near-instantaneous response times. They are controlled by Field Oriented Control (FOC) algorithms that adjust the magnetic field vector to produce smooth, precise movements without the cogging effect seen in geared systems.
Active Gyro Stabilization
The core of a gimbal is the Inertial Measurement Unit (IMU). This sensor package detects angular rate and acceleration changes thousands of times per second. The gimbal controller processes this data and sends counter-commands to the motors. If a drone rolls 10 degrees to the right, the gimbal roll motor rotates 10 degrees to the left instantly. This results in stabilization accuracy that can reach single-digit microradians (µrad), necessary for long-range laser designation or identifying thermal targets from kilometers away.
Technical Performance Comparison
The following table outlines the engineering specifications typically found in high-end surveillance PTZ units versus tactical gimbal payloads.
| Feature | Industrial PTZ Camera | Gyro-Stabilized Gimbal |
|---|---|---|
| Drive Mechanism | Geared / Belt Drive (High Torque) | Direct Drive BLDC (High Speed) |
| Stabilization Accuracy | >0.1° (Dependent on dampening) | <50 µrad (Active stabilization) |
| Axes of Movement | 2-Axis (Pan / Tilt) | 2-Axis or 3-Axis (Pan / Tilt / Roll) |
| Horizon Leveling | No | Yes (Via Roll Axis) |
| Vibration Isolation | Passive Rubber Mounts | Active IMU + Passive Dampers |
| Primary Application | Static Infrastructure / Masts | Mobile Platforms (UAV / USV / Vehicles) |
| Weight Efficiency | Heavy (Robust Housing) | Lightweight (SWaP Optimized) |
Application Suitability Analysis
Choosing between these technologies requires analyzing the platform dynamics and the mission profile. Over-engineering a static site with a gimbal wastes budget, while equipping a mobile platform with a basic PTZ leads to mission failure.
Fixed Perimeter Security
For border towers, prison perimeters, and critical infrastructure monitoring, the PTZ camera remains the superior choice. The heavy-duty gearing resists wind loads that would overpower a gimbal’s motors. Furthermore, PTZ cameras often feature “wiper” systems and ruggedized housings rated IP67 or IP68, capable of surviving sandstorms and salt spray with minimal maintenance. The lack of a roll axis is acceptable because the mounting pole does not roll.
Mobile and Airborne Operations
On a UAV or a marine vessel, high-frequency vibrations and low-frequency platform swaying are constant. A standard PTZ camera zooms in on a target, but the image will shake violently, rendering the pixels unusable for AI detection or human identification. A gimbal payload is mandatory here. The 3-axis stabilization ensures that even as a boat pitches in waves or a drone banks for a turn, the sensor remains locked on the target with a perfectly level horizon.
Multi Sensor Integration and SWaP Factors

Modern requirements often dictate the integration of multiple optical channels. This includes Visible Light cameras, Long-Wave Infrared (LWIR) thermal cores, and Laser Rangefinders (LRF).
Gimbal payloads are heavily optimized for SWaP (Size, Weight, and Power). In drone applications, every gram matters. Gimbals use magnesium alloys and remove unnecessary housing to minimize weight. The electronics are tightly integrated, often combining the video processing board with the motor controller to save space.
Conversely, PTZ cameras prioritize modularity and ease of repair over weight. They often use heavier aluminum or stainless steel casings. While this increases the payload weight significantly, it provides superior thermal management for high-powered cooled thermal detectors which require active cooling engines.
Frequently Asked Questions
Can a PTZ camera be used on a drone?
What is the difference between 2-axis and 3-axis stabilization?
Do gimbals have better zoom capabilities than PTZ cameras?
Why are gimbal payloads more expensive than PTZ cameras?
What is an EO/IR gimbal?