China Moneypro
EO IR Gimbal Payload Integration Guide
A technical deep dive into EO/IR gimbal payloads for integrators. We cover stabilization, VOx microbolometers, SWaP optimization, and connectivity standards.
Modern surveillance and reconnaissance missions demand increasingly sophisticated optical systems. For B2B system integrators designing Unmanned Aerial Vehicles (UAVs), Unmanned Surface Vessels (USVs), or fixed border security installations, the Electro-Optical/Infrared (EO/IR) gimbal payload represents the most critical subsystem for mission success. These stabilized sensor turrets are no longer just cameras; they are intelligent edge-processing hubs capable of multi-spectral fusion and real-time data analysis.
This engineering guide dissects the architecture of high-performance EO/IR gimbal payloads. We will explore the nuances of gyroscopic stabilization, thermal detector specifications, laser integration, and the critical Size, Weight, and Power (SWaP) constraints that define modern optoelectronics integration.
Key Takeaways for Payload Integration
- Stabilization Precision Matters: High-end payloads must achieve stabilization better than 30 µrad to ensure clear imagery at max optical zoom.
- Sensor Fusion: Combining visible light CMOS sensors with VOx uncooled microbolometers or cooled MWIR detectors provides superior situational awareness.
- SWaP Optimization: Minimizing weight and power consumption extends UAV flight times and reduces structural load.
- Onboard Processing: Modern gimbals incorporate video tracking boards and AI capabilities for target locking without ground station latency.
Architecture of a Multi Sensor EO IR Gimbal Payload
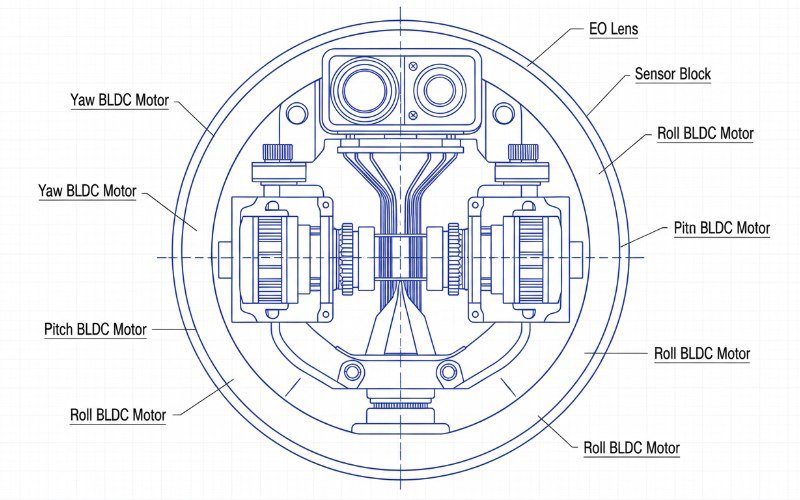
An EO/IR gimbal payload is a complex electromechanical system designed to isolate sensitive optical sensors from the vibrational environment of the carrier platform. The core architecture consists of the mechanical turret assembly, the sensor block, the stabilization electronics, and the video processing unit.
Mechanical Stabilization Systems
The primary function of the gimbal is to maintain the line of sight (LOS) stability. High-performance payloads utilize 2-axis (azimuth and elevation) or 4-axis designs. A 4-axis system includes inner and outer gimbals to decouple high-frequency vibrations from the sensor package more effectively than a standard 2-axis configuration. This is achieved using direct-drive brushless DC (BLDC) motors coupled with high-bandwidth MEMS gyroscopes.
The control loop frequency in professional grade infrared detectors systems often exceeds several kilohertz. This rapid feedback loop allows the system to counter angular velocity changes instantly, maintaining stabilization accuracy typically below 50 microradians (µrad) for tactical systems and under 10 µrad for long-range surveillance systems.
Slip Rings and Continuous Rotation
For a payload to offer 360-degree continuous rotation in azimuth, it must employ a high-quality slip ring. This electromechanical component transmits power, Ethernet signals, SDI video, and serial data (RS-422/RS-232) across the rotating interface. Integrators must verify that the slip ring specifications match the bandwidth requirements of high-definition raw video streams to prevent signal degradation or EMI interference.
Thermal Imaging Sensor Technology
The “IR” component of an EO/IR gimbal payload defines its night vision and atmospheric penetration capabilities. Selecting the right thermal core is a balance between range performance, cost, and cooling requirements.
Uncooled VOx Microbolometers
For lightweight UAVs and tactical applications, uncooled Vanadium Oxide (VOx) microbolometers are the industry standard. These sensors operate in the Long-Wave Infrared (LWIR) spectrum (8–14 μm). Modern VOx sensors feature a pixel pitch of 12μm, which allows for smaller optics without sacrificing resolution. A typical NETD (Noise Equivalent Temperature Difference) of <40mK or even <30mK ensures high contrast thermal images even in low thermal crossover conditions.
Cooled MWIR Detectors
For long-range ISR (Intelligence, Surveillance, and Reconnaissance) missions, cooled Mid-Wave Infrared (MWIR) detectors (3–5 μm) are superior. These sensors use a cryogenic cooler (Dewar assembly) to lower the sensor temperature to approximately 77K. This significantly reduces thermal noise, allowing for extreme sensitivity and the use of powerful continuous zoom lenses. While heavier and more power-hungry, cooled MWIR payloads are essential for identifying targets at distances exceeding 10 kilometers.

Laser Subsystems Integration
Beyond imaging, modern payloads often act as targeting systems. This requires the integration of laser modules aligned with the optical axis of the sensors.
- Laser Range Finders (LRF): Essential for geo-location. By measuring the time-of-flight of a laser pulse (typically 1550nm to be eye-safe), the system calculates the exact distance to the target. When combined with the gimbal’s GPS and IMU data, the system can calculate the precise GPS coordinates of the target.
- Laser Illuminators: Usually operating in the Near-Infrared (NIR) spectrum (e.g., 808nm or 850nm), these lasers are invisible to the naked eye but visible to night vision goggles (NVGs) and low-light cameras, useful for marking targets for ground forces.
- Laser Pointers: Visible lasers (green or red) used for non-verbal communication or warning signaling in law enforcement applications.
Video Processing and Object Tracking
The value of an EO/IR gimbal payload is increasingly defined by its software capabilities. The onboard video processing board typically utilizes FPGA or high-end SoC architectures to perform real-time image enhancement and analytics.
Advanced Video Tracking Algorithms
A robust video tracker enables the gimbal to lock onto a moving target automatically. Correlation tracking and centroid tracking algorithms analyze frame-to-frame pixel shifts to send correction commands to the gimbal motors, keeping the target in the center of the Field of View (FOV). This is critical for UAV operators who may lose manual track of a fast-moving vehicle or vessel.
Picture in Picture and Fusion
System integrators should look for payloads supporting Picture-in-Picture (PiP) modes, allowing simultaneous monitoring of thermal and visible feeds. Advanced systems offer digital fusion, overlaying the thermal signature onto the visible image to highlight heat sources (like engines or personnel) within a recognizable visual context.
Technical Comparison of Sensor Architectures
The following table outlines the key differences between uncooled LWIR payloads and cooled MWIR payloads to assist integrators in selection.
| Feature | Uncooled VOx (LWIR) | Cooled MCT/InSb (MWIR) |
|---|---|---|
| Spectral Range | 8 – 14 μm | 3 – 5 μm |
| Sensitivity (NETD) | <40 mK | <25 mK |
| DRI Range (Vehicle) | Detection ~2-4 km | Detection ~10-20 km |
| Start-up Time | < 5 seconds | 3-7 minutes (Cool down) |
| Maintenance | Low (Solid state) | High (Cooler MTBF ~10k-20k hours) |
| Power Consumption | Low (Ideal for electric UAVs) | High (Requires robust power supply) |
Connectivity and Interface Standards
Seamless integration into the host platform requires adherence to standard electrical and data interfaces. Proprietary connectors can lead to significant engineering delays.
Video Output Interfaces
High-definition video is typically output via 3G-SDI, HDMI, or Ethernet (RTSP/UDP streams). Ethernet is increasingly preferred for modern digital architectures as it allows for both video streaming and command and control (C2) over a single physical link. For latency-critical applications like FPV piloting, analog video (CVBS) outputs are often retained as a backup.
Control Protocols
Communication with the flight controller or mission computer usually occurs via serial ports (RS-232, RS-422) or Ethernet. The most common protocols include VISCA and Pelco-D, though military-grade systems often utilize STANAG 4586 compliant interfaces for interoperability with NATO ground control stations.
Environmental Durability Standards
An EO/IR gimbal payload is exposed to harsh elements. Specifications must include Ingress Protection (IP) ratings, typically IP66 or IP67, ensuring resistance to dust and water jets or immersion. Furthermore, the system must be ruggedized against shock and vibration. MIL-STD-810G compliance is a benchmark for ensuring the payload can withstand the g-forces associated with catapult launches or net recoveries in maritime UAV operations.
Frequently Asked Questions
What is the difference between 2 axis and 3 axis stabilization
How does pixel pitch affect thermal imaging performance
Why is object tracking crucial for UAV payloads